
Key concepts
Engineering
Robot
Anatomy
Gripping
Introduction
The human hand is pretty amazing. You can do things such as pick up a pencil, use a video game controller or climb a jungle gym without giving it much thought. Building a artificial hand that can do all those things quite a challenge! In this project you will try to build a simple artificial gripper that can pick up small objects.
Background
The human hand has five fingers, each with multiple joints. These joints are controlled by muscles and tendons—the muscles pull on the tendons, which pull on the joints and make them bend. The human hand has so many different joints, which makes it very flexible and versatile and easily adaptable to a wide variety of different tasks. You learn to use your hands as a small child, and by the time you grow up, you barely have to think about it at all!
On supporting science journalism
If you're enjoying this article, consider supporting our award-winning journalism by subscribing. By purchasing a subscription you are helping to ensure the future of impactful stories about the discoveries and ideas shaping our world today.
Engineers have been trying to build robotic hands for years, but it turns out that this is very difficult. We have gotten pretty good at building robotic hands that are good at one specific thing. For example, a robotic gripper in a factory might be designed to pick up a certain part and bolt it onto a car. If you try to get that gripper to pick up a tennis ball or a glass of water, however, it will not work at all! Building a mechanical hand that is as versatile as the human hand remains a huge challenge.
In this project you will build a simple artificial gripper using drinking straws and string. You will cut notches in the straws that will act as the "joints" and thread strings through the straws to act as the "tendons." Pulling on the strings will cause the joints to bend. You can experiment with building different types of grippers, for example a simple clawlike gripper that just has two fingers with one joint each or a full humanlike hand with individual control of multiple joints.
Materials
Plastic drinking straws
Needle (Use caution and adult help when handling sharp objects.)
String
Paper clips
Modeling clay
Assorted small objects to pick up
Scissors
Tweezers (optional)
Small rubber bands (optional)
Paper towel tube (optional)
Preparation
Assemble all of your materials on a flat working space that has enough area to make and test your creation.
Procedure
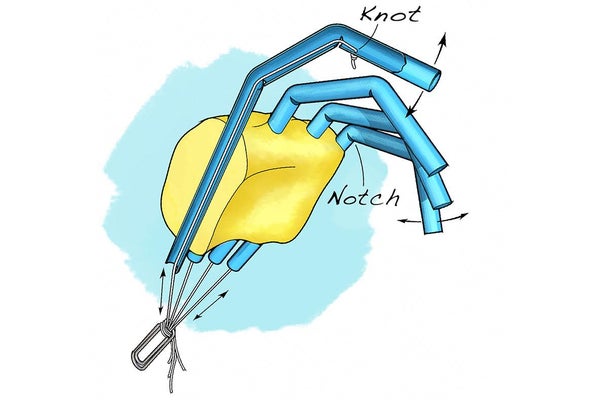
First you will practice making a single "finger." Use scissors (and adult assistance if necessary) to carefully cut a small triangular notch in the middle of a drinking straw. Make sure you do not cut the whole way through the straw. This should allow you to "kink" the straw at that point, but after you let go the straw should snap back to its original shape. This notch is the "joint" in your finger.
Tie one end of the string through the eye of the needle.
Carefully puncture the straw with the needle, just above the notch you cut out. Make sure you puncture the straw on the same side that you cut out the notch, not on the "back" side.
Push the needle all the way into the straw past the notch you cut out and thread it out the bottom of the straw. It might help to use a pair of tweezers to reach into the straw (either through the notch, or from the bottom) to grab the needle and pull it through. You can also hold the straw vertically and shake it, to let the needle fall down.
Keep pulling the needle through until about 10 centimeters of string comes out the bottom of the straw. This string will act like a "tendon" that helps the finger bend.
Cut the other end of the string, leaving enough extra that you can tie off a knot. Make sure the knot is large enough that it cannot be pulled through the hole you punctured with the needle.
Untie or cut off the string from the eye of the needle.
Tie the bottom end of the string to a paper clip.
You have just completed your first "finger." Hold the base of the straw with one hand. Pull on the paper clip with your other hand. This should cause the straw to bend at the notch, similar to a finger bending at a joint. What could you pick up with just this one finger?How would having more fingers help?
Now it's time to build more fingers! Repeat the above steps to make at least one more finger. You can also decide whether each finger has multiple joints or just one. If a finger does have multiple joints, you can use a single string to control all of them (by tying it off above the last joint) or individual strings to control each one (by threading multiple strings through the straw above each joint).
Play around with making different types of fingers and controlling them by pulling on the strings.
Now it's time to link up some fingers into a gripper! The type of hand you design and build is totally up to you. Keep in mind that you do not have to design a human hand with five fingers. For example, you could make a claw with two pincers (like a crab or lobster) or a claw with three or four symmetric fingers (like the kind in arcade machines that pick up a stuffed animal).
Try combining multiple fingers. Use modeling clay to form the base or "palm" of your hand by forming it around the base of the straws. Make sure you do not cover the bottom opening of the straws, so you can still pull on the string. Adjusting the modeling clay allows you to change the position and orientation of the fingers relative to one another.
Depending on the type of modeling clay you have, you may want to let it air-dry and harden so your hand will work better. (It might be difficult to work with the hand while the clay is still mushy. Some types of clay might be hard enough to begin with so that they will work right away.)
Try pulling on the string(s) to control the fingers once they are mounted in the palm of your hand. You might need to make some adjustments to get everything working properly. What changes do you think you can make to improve the performance of your hand?
Now try using your hand to pick up some small objects. Keep in mind that your hand is made of straws so it is not very strong, so you should only use it to pick up lightweight objects (for example, empty plastic bottles, not ones full of liquid).
Is your hand better at picking up certain objects than others?Could you design a hand that is specifically designed to snatch certain objects? For example, one type of hand to pick up cylindrical objects like bottles and another type to grab spherical objects like tennis balls? Do you think it would be hard to design something as adaptive as the human hand, which can easily pick up things with very different shapes?
Extra: Mount the palm of your mechanical hand on the end of a cardboard paper towel tube and thread the strings through the tube. Now you have a gripper with an extended reach that you can use to pick things up!
Extra: Plastic straws can be somewhat slippery, so try to improve the "grip" of your mechanical hand. For example, wrap small rubber bands around the straws. Does improving the "grip" of the straws make it easier to pick things up?
Observations and results
You should be able to build an artificial hand that can pick up light objects, such as ping-pong balls, empty plastic bottles or small stuffed animals. It will be difficult to build a hand out of straws and modeling clay that can grab heavier objects. If you want to build a stronger hand, you might be able to replace the straws and clay with sturdier materials from a hardware store (for example, plastic piping for the fingers, metal cable for the tendons and a wooden base with holes drilled in it for the palm).
It is much easier to build and control a hand where all the fingers and joints are controlled by a single string (similar to the "arcade machine"–style claw, where all the fingers open and close at once). It is much more difficult to build an articulated hand with multiple joints that are controlled individually—but that should not discourage you from trying! Remember, your own hands are very complicated, and professional engineers are still struggling to this day to build a fully functional robotic hand that is equivalent to a human one.
Because this is an engineering design activity, there is no specific formula to follow in building your hand. Designs can be very different, and there is no "right" or "wrong" way to make it. You might find some designs to be better at performing different functions. If you built different hands with different numbers of fingers, which one did you find to be the most versatile?
More to explore
Grasping with Straws: Make a Robot Hand Using Drinking Straws, from Science Buddies
Your Wonderful Hands, from Kids' Health
Science Activities for All Ages, from Science Buddies
This activity brought to you in partnership with Science Buddies

