
A new transforming turtle robot can explore treacherous regions where the land meets the sea—and may lead to future machines that navigate complex real-world conditions.
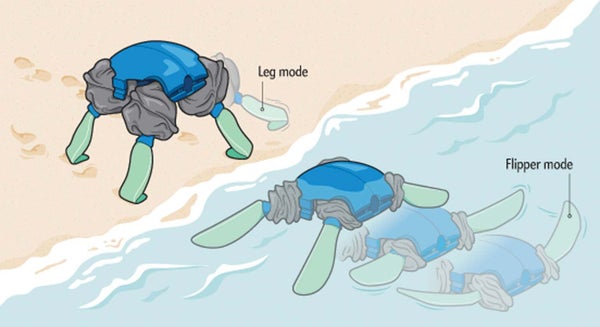
Combining the best mobility features of an ocean-swimming turtle and a land-walking tortoise, the Amphibious Robotic Turtle (ART), described recently in Nature, can morph its limbs from turtlelike flippers to tortoiselike legs. “Most amphibious robots … use dedicated propulsion systems in each environment,” says Yale University roboticist Rebecca Kramer-Bottiglio, who is the senior author on the paper. “Our system adapts a single unified propulsion mechanism for both environments: it has four limbs, and those limbs can transition between a flipper state for aquatic locomotion and a leg state for terrestrial locomotion.”
Each morphing limb is surrounded by a composite polymer material that is malleable when hot and stiff when cool. To change the limb’s shape, built-in copper heaters warm and soften the outer material. Then a soft robotic “muscle” underneath swells or deflates, shifting a flat flipper into a rounded leg, or vice versa. Finally, the polymer cools and hardens around the new shape over one to two minutes. The soft robotic limbs attach to more traditional “hard” robotic shoulder joints, which incorporate three electronic motors so ART can “crawl” or “creep” on land as well as “paddle” or “flap” in water. These joints connect to a modular chassis, where sealed PVC tubes protect the robot’s electronic components from water. A 3-D-printed “shell” gives the robot a streamlined shape and a space that can hold air or ballast to adjust buoyancy.
On supporting science journalism
If you're enjoying this article, consider supporting our award-winning journalism by subscribing. By purchasing a subscription you are helping to ensure the future of impactful stories about the discoveries and ideas shaping our world today.
Integrating both soft and traditional robotics gives ART its transforming ability, says Tønnes Nygaard, a roboticist at Oslo Metropolitan University, who did not contribute to the new study. “Very strict, rigid modes of locomotion [are] a necessity when you use traditional robotic techniques,” he adds. “But now with techniques like these from soft robotics, you might be able to do something that’s a bit more fluid.”
Such adaptive techniques might eventually help robots trek across the many different surfaces and environments found in the real world, without having to tote an extra propulsion system that might make them move less efficiently. Kramer-Bottiglio’s team found that ART uses about the same amount of energy as robots built for just one environment.
The robotic tortoise isn’t at the finish line yet: the current prototype still requires a tether to provide power and communication, and its movements are slow and awkward. But the researchers are working to improve these issues. “I’m very excited to see how far they’ve come,” Nygaard says. “And I’m very interested to see what will come out of this group in a couple of years.”
