

Robots are notoriously lousy jumpers. Some can jump high, but not repeatedly, over a short period. And vice versa. Duncan Haldane, a roboticist and Ph.D. student at the University of California, Berkeley, realized one implication of this shortcoming—many existing bots cannot maneuver large gaps and high hurdles at, say, a disaster site where they are doing rescue work. So Haldane turned to the animal kingdom to study nature's best jumpers, hoping to select one as a model for a more agile, autonomous machine.
Haldane started by creating a measure to assess both how high and how rapidly an animal could jump. His further research determined that nature's best continuous jumper is the galago, or bush baby, a nocturnal primate native to Africa. The galago's agility metric was twice that of any contemporary jumping robot. The results were detailed in a recent issue of Science Robotics.
The galago's legs and muscles are optimized for crouching, a position that helps it store potential energy in its tendons. Haldane translated those physics to fashion a robot he named Salto. It weighs just 100 grams (about the mass of a bar of soap) and has a one-meter vertical jump. But more remarkably it can jump off a floor to a target on a wall and ricochet an average of another 1.21 meters higher. The mechanics of the new jumping system, Haldane says, could be applied to any robot. And that means it is only a matter of time before more of our mechanical friends can leap tall buildings, at least in multiple bounds.
On supporting science journalism
If you're enjoying this article, consider supporting our award-winning journalism by subscribing. By purchasing a subscription you are helping to ensure the future of impactful stories about the discoveries and ideas shaping our world today.
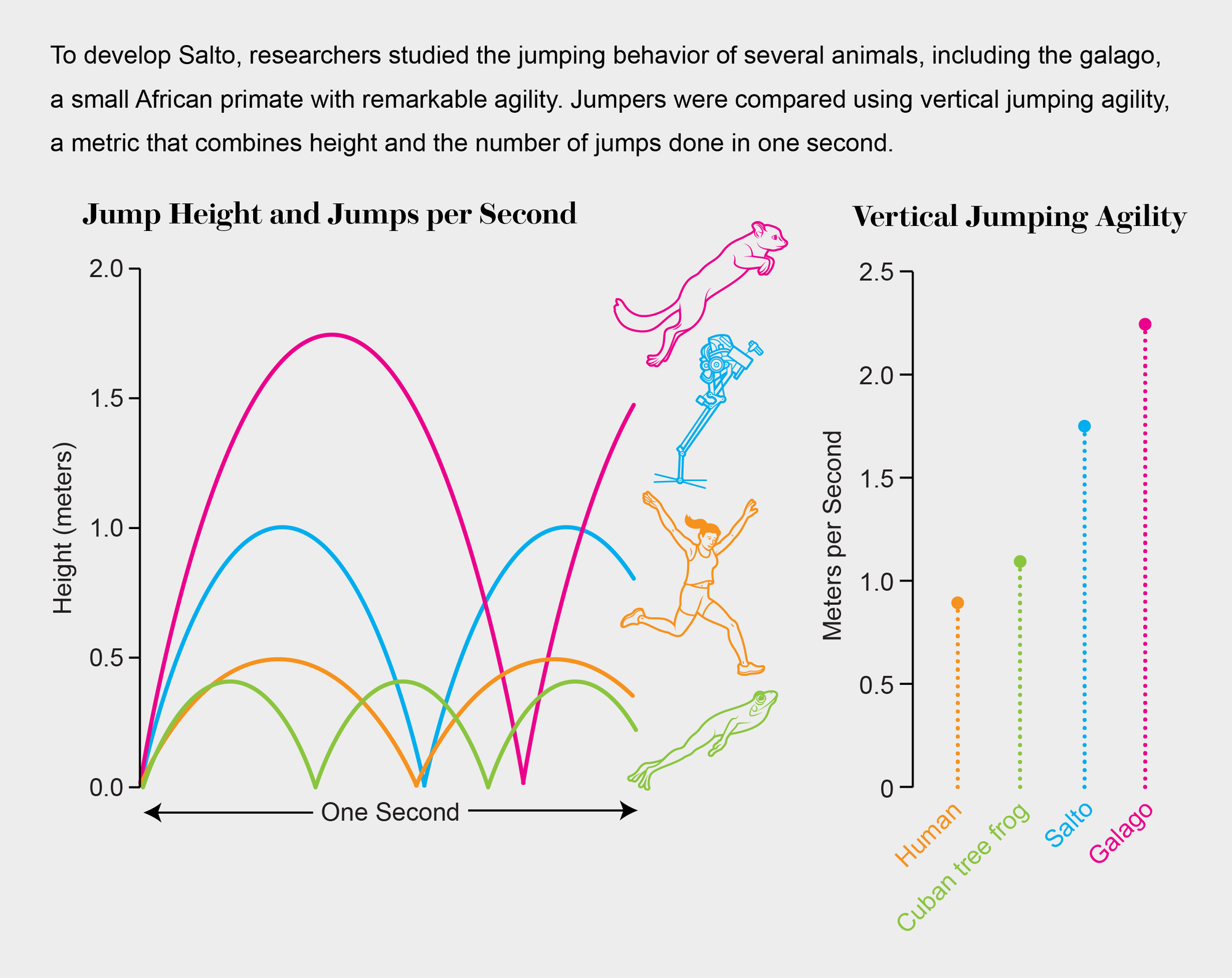
Credit: Brown Bird Design (figures); Amanda Montañez (graphs); Source: “Robotic Vertical Jumping Agility via Series-Elastic Power Modulation,” by Duncan W. Haldane et al., in Science Robotics, Vol. 1, No. 1, Article No. EAAG2048; December 6, 2016.
