
A bipedal robot can now put its best foot forward, stepping with a heel-toe motion that copies human locomotion more closely than flat-footed robot walkers can.
By rocking its "feet" forward from the heel and pushing off at the toe, the DURUS robot closely imitates the walking motion of people, making it more energy-efficient and better at navigating uneven terrain, according to Christian Hubicki, a postdoctoral fellow in robotics at the Georgia Institute of Technology and one of the researchers who helped DURUS find its footing.
Enhanced walking capabilities could help robots navigate environments that people move around in, and could improve the performance of bots created for disaster response, Hubicki told Live Science. [Robots on the Run! 5 Bots That Can Really Move]
On supporting science journalism
If you're enjoying this article, consider supporting our award-winning journalism by subscribing. By purchasing a subscription you are helping to ensure the future of impactful stories about the discoveries and ideas shaping our world today.
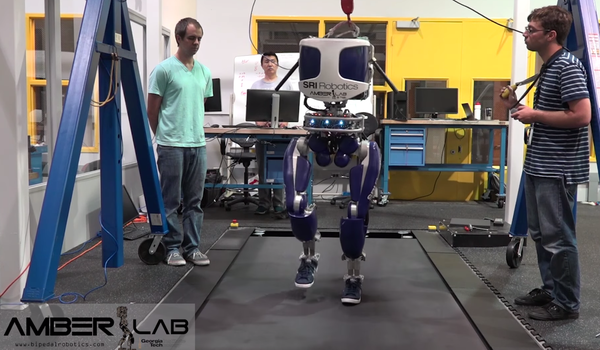
The humanoid robot DURUS was designed collaboratively by the research nonprofit SRI International and Georgia Tech's Advanced Mechanical Bipedal Experimental Robotics (AMBER) Lab. An earlier DURUS design was modified to accommodate the new manner of walking, enabled by a novel mathematical algorithm that adjusts the robot's momentum and balance, one step at a time.
Well-heeled
Robots that walk on two legs typically have "feet" that are large and flat, to provide a more stable platform, Hubicki told Live Science.
"Bigger feet mean a bigger polygon of support, and the harder it is to fall," Hubicki said.
The algorithms that dictate a robot's forward momentum typically keep those big feet flat on the ground when pushing off, to minimize the risk that the bot will tip over.
"As soon as you lean on an edge, you're like a pendulum—on a pivot point that can fall forward or backward," Hubicki said.
But while a flat-footed walker might perform well on a treadmill, uneven terrain in the real world that doesn't accommodate a flat foot could confound the algorithm and stop a robot in its tracks.
Enter the AMBER Lab researchers, who designed a new algorithm that works to keep a robot upright and moving forward even if only parts of the foot are engaged. Hubicki and his colleagues tested DURUS using a modified foot with an arch; every step began with the heel making contact—the "heel strike," according to Hubicki—and then rolling to the ball of the foot to push off from the ground. Springs installed by the robot's ankles act like tendons, storing the heel strike's energy to be released later, as lift.
On July 12, AMBER Lab posted a video of a confidently striding DURUS on YouTube. DURUS' new feet are about the same size as human feet—about half as long as the feet on the original model. And to emphasize the similarity, the team laced them into a pair of sneakers.
"We wanted to show that our algorithms could make it walk with human-size feet," Hubicki said. "What better way to do that than [by] putting shoes on it?"
The algorithm may even have applications beyond robotics, Hubicki added, suggesting that it could be used to improve the design of prosthetics and exoskeletons to help people who use assistance to get around.
Copyright 2016 LiveScience, a Purch company. All rights reserved. This material may not be published, broadcast, rewritten or redistributed.
